|
جندی شاپور (البرز) علمی فرهنگی
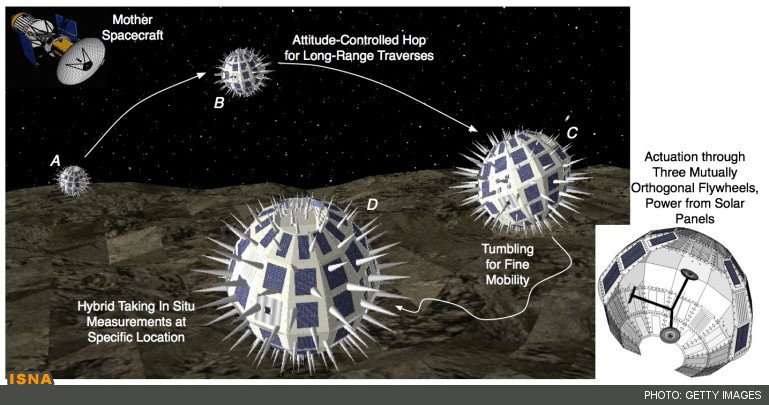
محققان دانشگاه استنفورد در حال کار بر روی خارپشتهای رباتیک هستند که در آینده میتوانند در کاوش قمر فوبوس مریخ مورد استفاده قرار گیرند.به گزارش سرویس فناوری خبرگزاری دانشجویان ایران (ایسنا)، این محققان در حال ساخت رباتهای کروی موسوم به «خارپشت» هستند که از عرض حدود نیم متر برخوردار بوده و برای سازگاری بهتر جهت چرخیدن و جهیدن در سطح فوبوس با گرانش بسیار پایین آن با میخ پوشیده شده است.قمر فوبوس بسیار کوچک و قطر آن تنها 22.2 کیلومتر است. از زمان کشف این قمر و همچنین دیموس در سال 1877، اطلاعات بسیار کمی در مورد طبیعت آن به دست آمده است.این قمر ممکن است یک سیارک عبوری باشد که توسط مریخ دستگیر شده یا تکهای از خود سیاره باشد که در اثر یک برخورد قدیمی، جدا شده است. در صورت واقعیت داشتن حدس دوم، این قمر میتواند بدون هزینه و خطر بالای فرود بر روی مریخ، اطلاعات زیادی را در مورد این سیاره ارائه کند.فوبوس همچنین یک محل مناسب برای آزمایش فناوریهای مورد نیاز برای بررسی مریخ است؛ از این رو کشورهای آمریکا، کانادا، روسیه و سازمان فضایی اروپا تا کنون ماموریتهایی را برای بررسی این قمر برنامهریزی یا اجرا کردهاند.تنها مشکل موجود این است که گرانش فوبوس به اندازه یک هزارم زمین است که استفاده از چرخ یا پا را به دلیل عدم وجود کشش یا میزان بسیار کم آن مشکل میکند. از این رو ساخت یک کاوشگر برای این قمر به شکل یک چالش بزرگ درآمده است.این محققان با همکاری ناسا و موسسه فناوری ماساچوست دست به طراحی خارپشتهای رباتیک زدهاند که برای قمر فوبوس مناسب است. این ربات نوعی دستگاه هیبریدی بوده که هم فضاپیما و هم کاوشگر است.این ربات تقریبا کروی بوده و از جنبههای بسیار با پوشش صفحات خورشیدی و میخ ساخته شده است. درون پوسته این خارپشت سه صفحه گردان با زاویه 90 درجه نسبت به یکدیگر قرار دارد. با چرخش این صفحات، میخها فرو رفته و خارپشت میتواند بچرخد، جست و خیز کند، بلغزد و در قوسهای 10 متری بر روی سطح فوبوس بپرد؛ این درحالی است که این خارپشت روباتیک تنها بخشی از نقشه بوده و بخش دیگر آن شامل فضاپیمای مدارگرد «نقشهبردار فوبوس» است. این فضاپیما که به اندازه یک میز کوچک بوده و نیروی خود را با دو صفحه خورشیدی تامین میکند، به عنوان حامل شش ربات خارپشت عمل خواهد کرد.هر دو فضاپیمای نقشهبردار فوبوس و خارپشتهای رباتیک به دلیل فاصله صدها میلیون کیلومتری آنها تا بخش کنترل ماموریت، تا حد زیادی خودکار طراحی شدهاند.مأموریت کاوش فوبوس سه سال به طول انجامیده و شامل یک سفر دو ساله از زمین خواهد بود. فضاپیمای نقشهبردار به محض ورود به فوبوس، اسکنهایی را از مدار انجام داده و توپوگرافی آنرا نقشهبرداری خواهد کرد. سپس با فاصله چند روز این خارپشتها را برای بررسیهای نزدیکتر در سطح قمر رها خواهد کرد.این فضاپیما و رباتهای کرویاش در کنار یکدیگر برای تعیین محل و جهت خارپشتها و هدایت آنها به سوی مناطق هدف کار خواهند کرد. این رباتها در نهایت اطلاعات به دست آمده را به فضاپیما ارسال کرده که در نهایت به زمین مخابره می شود.اگرچه هیچ تائید رسمی برای ماموریت آینده به قمر فوبوس وجود ندارد اما محققان امیدوارند که خارپشتهای رباتیک آنها تا 20 سال آینده بر روی این قمر فرود بیایند.طرح پیشنهادی این ماموریت در ماه مارس در نشست هوافضای موسسه مهندسان برق و الکترونیک ارائه خواهد شد.
نظرات شما عزیزان:
درباره وبلاگ  به تارنمای جندی شاپور البرز خوش آمدید. دانشگاه گندی شاپور در عصر خود بزرگترین مرکز فرهنگی شد. دانشجویان و استادان از اکناف جهان بدان روی میآوردند. مسیحیان نسطوری در آن دانشگاه پذیرفته شدند و ترجمه سریانیهای آثار یونانی در طب وفلسفه را به ارمغان آوردندنو افلاطونیها در آنجا بذر صوفی گری کاشتند. سنت طبی هندوستان، ایران، سوریه و یونان در هم آمیخت و یک مکتب درمانی شکوفا را به وجود آورد. آخرین مطالب آرشيو نويسندگان موضوعات پیوندهای روزانه پيوندها
|
|||||||||||||||||||
|
|